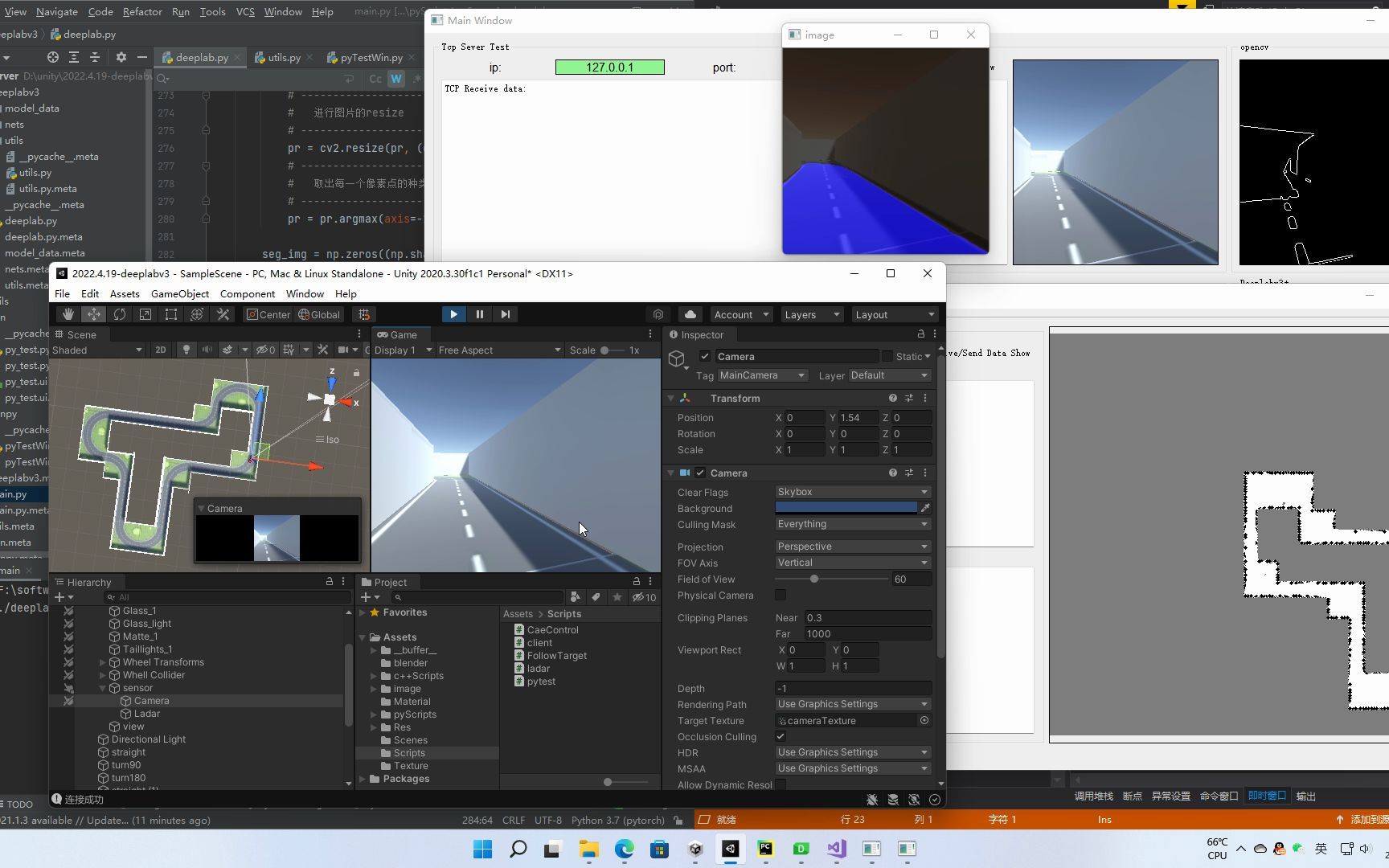
 采用unity进行车辆仿真,软件采用跨平台跨语言设计,利用tcp服务器进行连接服务器借鉴双向链表结构,一端连接仿真平台,另一端为其他接入分析软件提供接口软件架构以及使用的技术都非常简单,如果只是自用可以省去线程池的管理之类代码,一周左右就可完成布局更新日志: 相比前一次上传视频,加快激光雷达旋转速度,加速建图,增加了16线激光雷达设计,以及对opengl的使用, 加入deeplabv3+神经网络进行道路语义分割demo运行测试(数据集完全自己采集自己制作) 加入opencv处理显示(大津阈值法+canny卷积核处理)存在问题: 激光雷达底层逻辑还是有点问题,因此暂时没有进行opengl点云显示demo运行。后面有空在修改(没空就不改了)ps:教程视频正在着手开始录制
采用unity进行车辆仿真,软件采用跨平台跨语言设计,利用tcp服务器进行连接服务器借鉴双向链表结构,一端连接仿真平台,另一端为其他接入分析软件提供接口软件架构以及使用的技术都非常简单,如果只是自用可以省去线程池的管理之类代码,一周左右就可完成布局更新日志: 相比前一次上传视频,加快激光雷达旋转速度,加速建图,增加了16线激光雷达设计,以及对opengl的使用, 加入deeplabv3+神经网络进行道路语义分割demo运行测试(数据集完全自己采集自己制作) 加入opencv处理显示(大津阈值法+canny卷积核处理)存在问题: 激光雷达底层逻辑还是有点问题,因此暂时没有进行opengl点云显示demo运行。后面有空在修改(没空就不改了)ps:教程视频正在着手开始录制
版权声明:本文内容来源网络。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 910031559@qq.com,一经查实,本站将立刻删除。








添加新评论